
Рулевое управление — одна из основных систем автомобиля, которая представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса (руля) и угла поворота управляемых колес (в большинстве моделей автомобилей это передние колеса). Основное назначение рулевого управления для любых транспортных средств — это обеспечение поворота и поддержание заданного водителем направления движения.
Особенности узла и конструкция
На автомобилях используется кинематический способ смены направления движения, подразумевающий, что осуществление поворота происходит за счет смены положения управляемых колес. Обычно управляемой является передняя ось, хотя существуют и авто с так называемой системой подруливания. Особенность работы в таких авто заключается в том, что колеса задней оси тоже поворачиваются при изменении направления, хоть и на меньший угол. Но пока эта система широкого распространения не получила.
Помимо кинематического способа на технике используется еще и силовой. Особенность его заключается в том, что для совершения поворота колеса одной стороны притормаживаются, в то время, как с другой стороны они продолжают двигаться с прежней скоростью. И хоть этот способ изменения направления на легковых авто распространения не получил, на них он все же используется, но в несколько ином качестве – как система курсовой устойчивости.
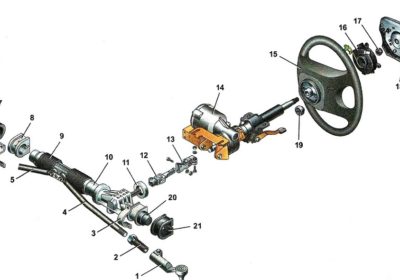
Этот узел автомобиля состоит из трех основных элементов:
- рулевая колонка;
- рулевой механизм;
- привод (система тяг и рычагов);

У каждой составляющей – своя задача.
РУЛЕВАЯ КОЛОНКА
Схема рулевого управления обязательно включает в себя колонку, которая состоит из следующих деталей и узлов:
- руля (или рулевого колеса);
- вала (или валов) колонки;
- кожуха (трубы) колонки с подшипниками, предназначенными для вращения вала (валов);
- крепежных элементов для обеспечения неподвижности и устойчивости конструкции.
Схема действия колонки заключается в приложении водительского усилия на рулевое колесо и последующей передаче направленно-вращательных движений руля всей системе, если водитель желает изменить режим движения автомобиля.
Рулевой привод
Конструкции рулевого привода различаются расположением рычагов и тяг, составляющих рулевую трапецию, по отношению к передней оси. Если рулевая трапеция находится впереди передней оси, то такая конструкция рулевого привода называется передней рулевой трапецией, при заднем расположении — задней трапецией. Большое влияние на конструктивное исполнение и схему рулевой трапеции оказывает конструкция подвески передних колес.
При зависимой подвеске рулевой привод имеет более простую конструкцию, так как состоит из минимума деталей. Поперечная рулевая тяга в этом случае сделана цельной, а сошка качается в плоскости, параллельной продольной оси автомобиля. Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. Тогда продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес.
При независимой подвеске передних колес схема рулевого привода конструктивно сложнее. В этом случае появляются дополнительные детали привода, которых нет в схеме с зависимой подвеской колес. Изменяется конструкция поперечной рулевой тяги. Она сделана расчлененной, состоящей из трех частей: основной поперечной тяги и двух боковых тяг — левой и правой. Для опоры основной тяги служит маятниковый рычаг , который по форме и размерам соответствует сошке. Соединение боковых поперечных тяг с поворотными рычагами цапф и с основной поперечной тягой выполнено с помощью шарниров, которые допускают независимые перемещения колес в вертикальной плоскости. Рассмотренная схема рулевого привода применяется главным образом на легковых автомобилях.
Рулевой привод, являясь частью рулевого управления автомобиля, обеспечивает не только возможность поворота управляемых колес, но и допускает колебания колес при наезде ими на неровности дороги. При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических.
Гидроусилитель рулевого управления (гур)
Предназначен для облегчения работы водителя при повороте рулевого колеса. В последнее время применяется в рулевом управлении легковых автомобилей. Гидроусилитель работает по принципу шприца. Он состоит из насоса, распределительного устройства и гидроцилиндра.
ГУР представляет собой герметичный картер, внутри которого находится управляющий клапан и поршень-рейка. Этот поршень соединен винтовой передачей с рулевым валом и своей зубчатой рейкой с шестерней на валу, передающем усилие на рулевую рейку или сошку. С картером ГУР через патрубки соединен насос с расширительным бачком. В традиционных простых системах привод насоса осуществляется через ремень от коленчатого вала двигателя. В более современных насос ГУР приводится отдельным электромотором — такие усилители называют электрогидравлическими усилителями (ЭГУР). Пока руль находится в положении «прямо», управляющий клапан также пребывает в среднем положении, и рабочая жидкость перекачивается через него. При повороте же руля в ту или иную сторону клапан перемещается, и жидкость начинает давить на поршень, создавая усилие на валу.
При повороте рулевого колеса распределительное устройство направляет жидкость под давлением в одну из полостей гидроцилиндра, тем самым, помогая водителю на поворотах. При повороте налево, жидкость под давлением поступает в полость «А», а при повороте направо в полость «Б». Когда двигатель не работает, поворот руля будет осуществляться с заметным усилием, так как гидроусилитель не действует.
В обычных ГУР это усилие постоянно и не зависит от скорости движения автомобиля. Отсюда удобный на парковочных маневрах руль с ГУР оказывается недостаточно четким на скорости. Поэтому современные системы ЭГУР, кроме электромотора, имеют управляющий электронный блок, который, исходя из данных скорости автомобиля, рассчитывает нужную величину создаваемого усилия. Чем больше скорость машины, тем меньшее требуется усилие на руле. Соответственно, уменьшается давление на поршень, а при достижении определенной скорости, например 70 км/ч, гидроусилитель выключается вовсе.
При неисправности усилителя, также значительно возрастает усилие поворота рулевого колеса автомобиля. Естественно, что при этом невозможно сразу же отреагировать на изменившуюся дорожную обстановку, что может вызвать опасные последствия. Кроме того, при неработающем усилителе руля, возрастает физическая и эмоциональная усталость водителя. После непродолжительной поездки он уже не в состоянии принимать правильные решения и может явиться виновником дорожно-транспортного происшествия.
Устройство системы рулевого управления
Рулевое колесо (руль) — предназначено для управления водителем с целью указания направления движения автомобиля. В современных моделях оно дополнительно оснащается кнопками управления мультимедийной системой. Также в рулевое колесо встраивается передняя подушка безопасности водителя.Конструктивно система рулевого управления состоит из следующих элементов:
- Рулевая колонка — выполняет передачу усилия от руля к рулевому механизму. Она представляет собой вал с шарнирными соединениями. Для обеспечения безопасности и защиты от угона колонка может быть оснащена электрическими или механическими системами складывания и блокировки. Дополнительно на рулевой колонке устанавливается замок зажигания, органы управления светотехникой и стеклоочистителем ветрового стекла автомобиля.
- Рулевой механизм — выполняет преобразование усилия, создаваемого водителем через поворот рулевого колеса и передает его приводу колес. Конструктивно представляет собой редуктор с некоторым передаточным отношением. Сам механизм соединяет с рулевой колонкой карданный вал рулевого управления.
- Рулевой привод — состоит из рулевых тяг, наконечников и рычагов, выполняющих передачу усилия от рулевого механизма к поворотным кулакам ведущих колес.
- Усилитель рулевого управления — повышает усилие, которое передается от руля к приводу.
- Дополнительные элементы (амортизатор рулевого управления или «демпфер», электронные системы).
Стоит также отметить, что подвеска и рулевое управление автомобиля имеют тесную взаимосвязь. Жесткость и высота первой определяют степень отклика автомобиля на вращение рулевого колеса.
Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
- Реечный — самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
- Червячный — обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой — принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
В зависимости от вида усилителя, который предусматривает устройство рулевого управления, различают системы:
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) — система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления — работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств — главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
НЕПОЛАДКИ И НЕИСПРАВНОСТИ
К сожалению, рулевому управлению, как и всем остальным основным механизмам автомобиля свойственны поломки. Иногда они могут возникнуть на ровном месте, но в большинстве случаев им предшествуют определённые симптомы, а также неправильная эксплуатация автомобиля.
Есть ряд факторов, которые наносят существенный ущерб системе рулевого управления автомобилем. К ним относят следующие:
- плохое дорожное покрытие,
- агрессивное вождение,
- отсутствие своевременного технического обслуживания,
- некачественный ремонт рулевого управления,
- установка неоригинальных запчастей,
- превышение срока эксплуатации устройства.
В результате действия всех этих факторов в системе рулевого управления возникают неполадки. Если это произойдёт прямо на дороге, то возможны серьёзные последствия вплоть до ДТП. Именно поэтому так важно «прислушиваться» к признакам, которые если и не помогут сразу же определить неисправность, то вызовут как минимум настороженность.
КАКИЕ БЫВАЮТ НЕИСПРАВНОСТИ
Первое весомое обстоятельство, которое должно дать вам серьёзные основания для обращения в ТО — люфт при поворотах рулевого колеса. Если во внимание брать слова из учебника по правилам дорожного движения, то данный суммарный показатель не должен превышать 10 градусов. Вот только как его измерить, никаких указаний нет, фактически всё нужно делать на глаз.
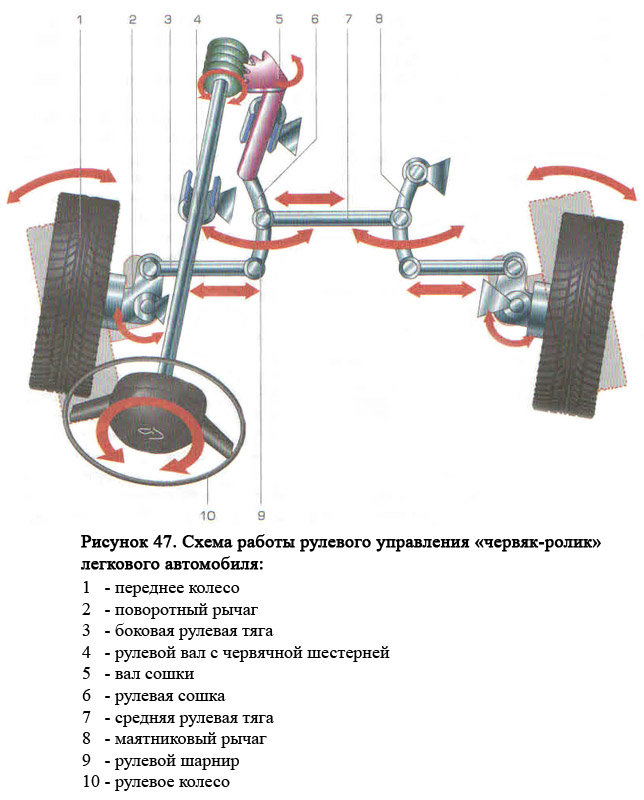
Чтобы понять, почему так происходит, рассмотрим более подробно схему системы рулевого управления. Основными её элементами являются червячок и ролик. В некоторых системах используется рейка и шестерни, но это уже детали.
В процессе эксплуатации описанные выше детали изнашиваются. Результат весьма предсказуем — угол холостого хода растёт. К счастью, данный недостаток довольно просто поддаётся ремонту. Мало того, в самой процедуре нет ничего сложного.
На червячно-роликовом узле есть винты. Достаточно их прикрутить и люфт станет гораздо меньше, а то и вовсе исчезнет. Для того чтобы узнать всё ли исправлено, или понять, нуждается ли система в исправлениях — возьмите люфтомер. Погрешность данного устройства практически нулевая.
Устройство крепится на рулевой колонке. Точнее, часть измерительного прибора в виде шкалы. Стрелка устанавливается на колесе. При желании вы можете сделать данное устройство самостоятельно. Но в таком случае за точность выводимых им данных вы же и будете нести всю ответственность.
РАСПРОСТРАНЁННЫЕ НЕИСПРАВНОСТИ
Есть ряд признаков, которые чётко указывают на определённые неисправности в рулевом управлении:
- стук во время движения — износ шарниров;
- пульсация рулевого колеса — нарушена настройка колёс;
- биение в рулевом колесе возможно при нарушении настроек колёс, износе деталей рулевых тяг или выходе из строя подшипника рулевой колонки;
- люфт больше чем 10 градусов — износ наконечников рулевых тяг.
Для каждой из этих неисправностей есть свой ремкомлект. Его можно приобрести в любом автомобильном сервисе.
Травмобезопасный рулевой механизм
При лобовых ударах серьезную опасность для водителя представляет рулевое колесо, которое часто причиняет тяжелые ранения. Поэтому ступицу рулевого колеса глубоко утапливают и обкладывают мягкими материалами. Рулевую колонку часто выполняют из перфорированного металла, так что при ударе она деформируется, поглощая пластическую энергию .
Предусматриваются и другие меры защиты, снижающие тяжесть последствий столкновения: возможность перемещения рулевого колеса и рулевой колонки и поглощения ими энергии удара, равномерного распределения удара рулевого колеса по поверхности груди водителя , а также складывающийся рулевой вал )
Технические требования к рулевому управлению по гост р 41.12-2001
6.1 Во время испытаний на столкновение порожнего транспортного средства в снаряженном состоянии и без манекена, с барьером и при скорости 48,3 км/ч (30 миль/ч) верхняя часть рулевой колонки и рулевого вала не должна перемещаться назад в горизонтальном направлении и параллельно продольной оси транспортного средства более чем на 12,7 см и в вертикальном направлении вверх более чем на 12,7 см, при этом оба размера рассматриваются по отношению к какой-либо точке транспортного средства, которая не переместилась в результате этого столкновения (под термином «по горизонтали подразумевается: в горизонтальной плоскости по отношению к салону неподвижного транспортного средства перед испытанием, а не а горизонтальной плоскости по отношению к грунту во время движения транспортного средства, а пол термином «по вертикали- подразумевается: в вертикальной плоскости, перпендикулярной горизонтальной плоскости, определенной понятием «по горизонтали» и направленной вверх).
6.1.1 Если транспортное средство приводится в движение с помощью электродвигателя, то испытание на столкновение, предписанное в пункте 6.1, проводится с установленным общим выключателем тягового аккумулятора в положение «ВКЛЮЧЕНО». Кроме того, в ходе проведения испытания и после него должно обеспечиваться выполнение нижеследующих предписаний:
6.1.1.1 моноблоки должны оставаться закрепленными в местах их установки.
6.1.1.2 жидкий электролит не должен попадать в отделение для пассажиров; допускается небольшая утечка, но за пределами транспортного средства и при условии, что объем жидкости, которая была пролита в течение первого часа после испытания, не превышает 7 % от общего объема жидкого электролита в тяговом аккумуляторе.
6.2 Если рулевая колонка сталкивается с моделью туловища, которая ударяется об эту колонку с относительной скоростью не менее 24,1 км/ч (15 миль/ч), то сила, с которой рулевая колонка воздействует на модель туловища, не должна превышать 1,111 даН (дека Ньютон) (11,11Н).
6.3 Если рулевое колесо подвергается удару со стороны ударного элемента, который сталкивается с ним с относительной скоростью 24,1 км/ч, то в соответствии с требованиями, указанными в приложении 5 ГОСТ Р 41.12-2001, замедление ударного элемента в общей сложности не должно превышать 80 g в течение более чем 3 миллисекунд. Замедление должно всегда составлять менее 120 g для КЧХ 600 Гц. (Комплексная частотная характеристика)
6.4 Рулевое управление должно быть спроектировано, сконструировано и установлено таким образом, чтобы:
6.4.1 до испытания на удар, указанного в пунктах 6.2 и 6.3, ни на одном из участков поверхности рулевого управления, которые обращены к водителю и которых может коснуться сфера диаметром 165 мм, не было опасных неровностей или острых граней с радиусом кривизны менее 2,5 мм;
6.4.1.1 после любого испытания на удар, указанного в пунктах 6.2 и 6.3, на том участке поверхности рулевого управления, который обращен к водителю, не было никаких острых или неровных граней, которые могли бы увеличить опасность или серьезность ранений водителя. Незначительные трещины и разрывы на поверхности не принимаются во внимание.
6.4.1.1.1 В том случае, если имеется выступающая деталь, изготовленная из нежесткого материала твердостью менее 50 единиц по шкале Шора А и смонтированная на жесткой опоре, требования пункта 6.4.1.1 применяются лишь к жесткой опоре.
(Твердость по Шору — один из методов измерения твердости материалов. Как правило, используется для измерения твердости низкомодульных материалов. Обычно — полимеров: пластмасс, эластомеров, каучуков и продуктов их вулканизации.
Метод и шкала были предложены Альбертом Ф. Шором в 1920-х годах. Он же разработал соответствующий измерительный прибор, называемый дюрометром
Метод позволяет измерять глубину начального вдавливания, глубину вдавливания после заданных периодов времени или и то и другое вместе.
Для измерения дюрометром Шора применяется несколько шкал (в общей сложности 12 шкал), используемых для материалов с различными свойствами. Две наиболее распространенных шкалы — тип A и тип D. Шкала типа A предназначена для более мягких материалов, в то время как D для более твердых. Все шкалы делятся от 0 до 100 условных единиц, при этом высокие значения соответствуют более твердым материалам).
6.4.2 Рулевое управление должно быть спроектировано, сконструировано и смонтировано таким образом, чтобы на нем не было элементов или вспомогательных приспособлений, включая привод сигнального прибора и элементы обшивки, за которые могут зацепиться одежда или украшения водителя в обычных условиях управления транспортным средством.
6.4.3 Если рулевое управление не входит в комплектное оборудование, то оно должно отвечать спецификациям, которые проверяются в ходе испытаний в соответствии с 2.1.3 приложения 4 и 2.3 приложения 5 ГОСТ Р 41.12-2001.
Установка рулевого управления осуществляется только при подаче заявки на его официальное утверждение в качестве отдельного механизма. Рулевое управление испытывается в полностью укомплектованном виде. Рулевое колесо должно устанавливаться таким образом, чтобы минимальное ударное расстояние между ним и испытательным стендом составляло 100 мм. Рулевой вал должен быть жестко закреплен на испытательном стенде таким образом, чтобы он не перемещался от удара.
6.4.4 В случае «универсального органа рулевого управления» эти требования должны удовлетворяться в отношении:
6.4.4.1 всех возможных углов наклона рулевой колонки, причем испытание должно проводиться, по крайней мере, для максимального и минимального углов наклона рулевой колонки в отношении всех официально утвержденных типов транспортных средств, для которых предназначается это рулевое управление;
6.4.4.2 всех возможных положений ударного элемента и макета туловища по отношению к рулевому управлению, причем испытания должны проводиться, по крайней мере, для среднего положения на всех официально утвержденных типах транспортных средств, для которых предназначено это рулевое управление. В тех случаях, когда используют рулевую колонку, она должна быть такого типа, который соответствовал бы «наихудшим» условиям.
6.4.5 Если для установки единого типа органа рулевого управления на различные рулевые колонки применяются переходные устройства и если можно показать, что при использовании таких переходных устройств характеристика поглощения энергии системы является аналогичной, то все испытания можно проводить с переходным устройством одною типа. 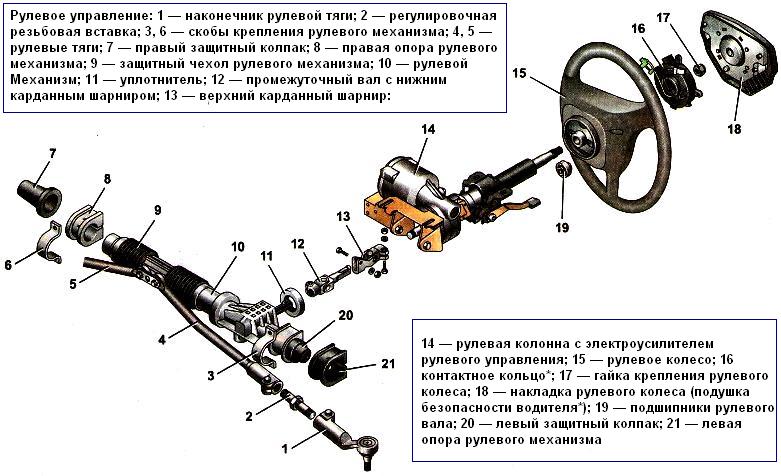
Особенности правостороннего и левостороннего руля
В большинстве стран левостороннее рулевое управление (или правостороннее движение). Основное отличие механизмов не только в позиции руля, но и в рулевом редукторе, который адаптирован под различные стороны подключения. С другой стороны, переоборудование правостороннего руля на левостороннее рулевое управление все же возможно.В современных автомобилях может быть предусмотрено правостороннее или левостороннее рулевое управление, что зависит от вида транспортного средства и законодательства отдельных стран. В зависимости от этого руль может располагаться справа (при левостороннем движении) или слева (при правостороннем).
В некоторых видах спецтехники, например, в тракторах, предусматривается гидрообъемное рулевое управление, которое обеспечивает независимость положения руля от компоновки других элементов. В этой системе отсутствует механическая связь привода и рулевого колеса. Для выполнения поворота колес гидрообъемное рулевое управление предусматривает силовой цилиндр, которым управляет насос-дозатор.
Основные достоинства, которые имеет гидрообъемное рулевое управление для транспортных средств в сравнении с классическим рулевым механизмом с гидравлическим усилителем: необходимость приложения меньших усилий для выполнения поворота, отсутствие люфта, а также возможность произвольного расположения узлов системы.
Таким образом, ГОРУ может обеспечивать и правостороннее, и левостороннее рулевое управление. Это позволяет его устанавливать в транспортных средствах с особыми режимами эксплуатации (дорожно-строительные машины, уборщики).